Esta batalla de Beyblade es como una detección de arranque
Equipo de Arduino – 10 de julio de 2025

Battlebots es fascinante, porque sus fabricantes siempre logran ofrecer nuevas formas únicas de destruir a los oponentes mientras evitan el daño al mismo tiempo. Como cualquier buen deporte, es una metagamación desarrollar una estrategia basada en las estrategias adversas esperadas. La estrategia de Ari era ejecutar su robot de lucha a velocidades locas y requiere ingeniería bastante meticulosa.
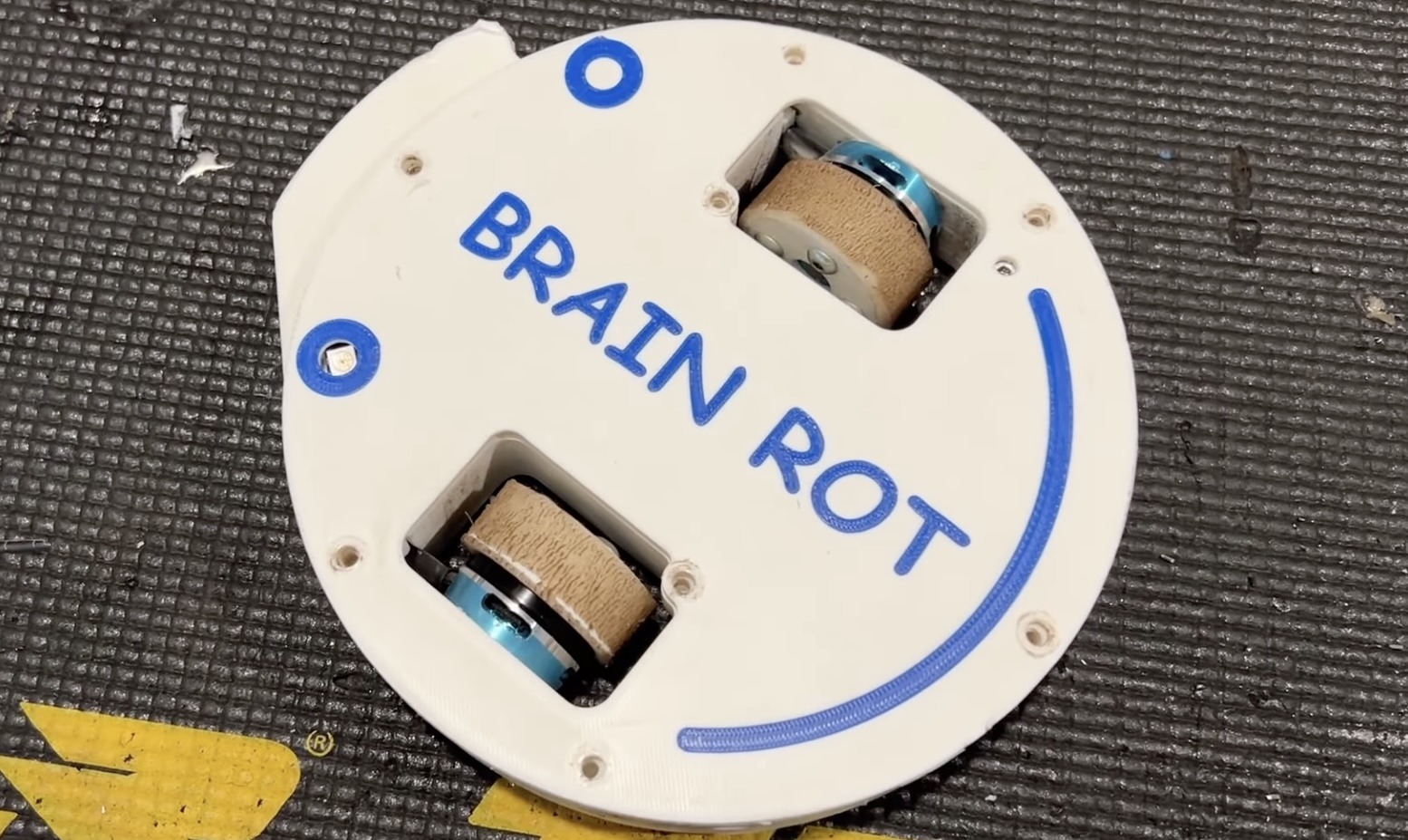
El competidor de Ari es como el equivalente del robot de una Beyblade. Es circular y realmente gira, muy rápido. Una proyección atrapa bots opuestos y transfiere toda esta energía cinética para moverse a un golpe increíblemente poderoso. Pero la física es lo que es, la Beyblade Bot de Ari también experimenta este mismo impacto. Por lo tanto, ARI tuvo que diseñar el cuerpo del bot para sostener las fuerzas y la electrónica necesarias para resistir también los impactos.
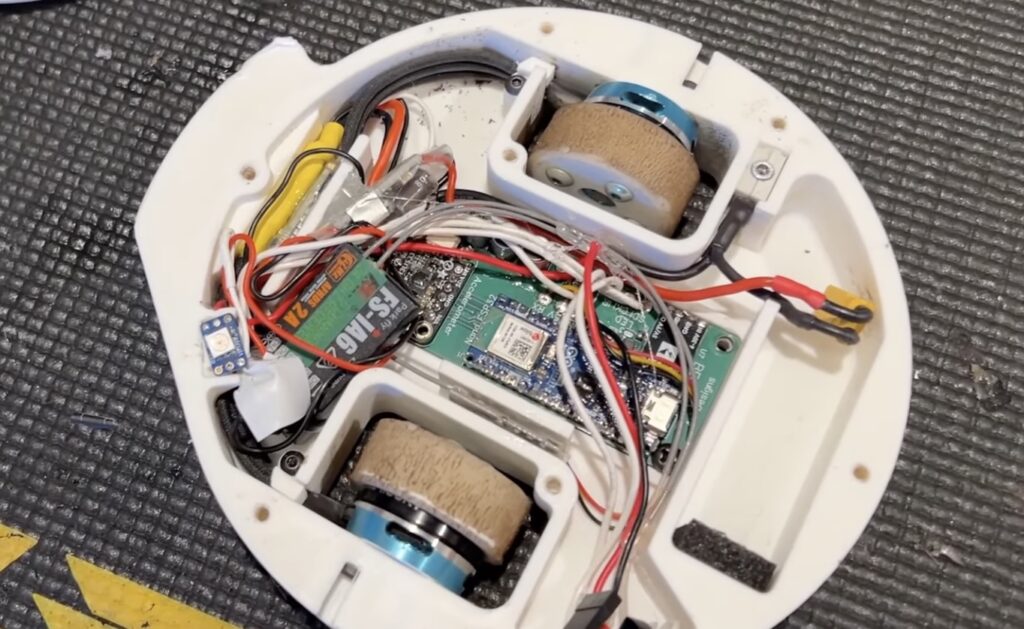
El robot pesa solo un libro y esto incluye la batería y los motores, por lo que Ari tuvo que mantener la luz de la electrónica de control. El componente principal es un Junta Arduino Nano ESP32que se conecta a otros componentes a través de una PCB personalizada. Los otros componentes LED, motores CC sin escobas y controladores de velocidad electrónicos (ESC) que conducen a los motores a velocidades tan ridículas.
Funcionó muy bien y el Bot Ari desgarró la competencia como una sierra de zumbido incontrolable a través de la mantequilla asustada. Ari perdió la pelea final, pero fue en una especie de tecnicismo porque una conexión suelta interfirió con su capacidad para controlar el bot. Aun así llamamos a diseño y éxito de la estrategia.