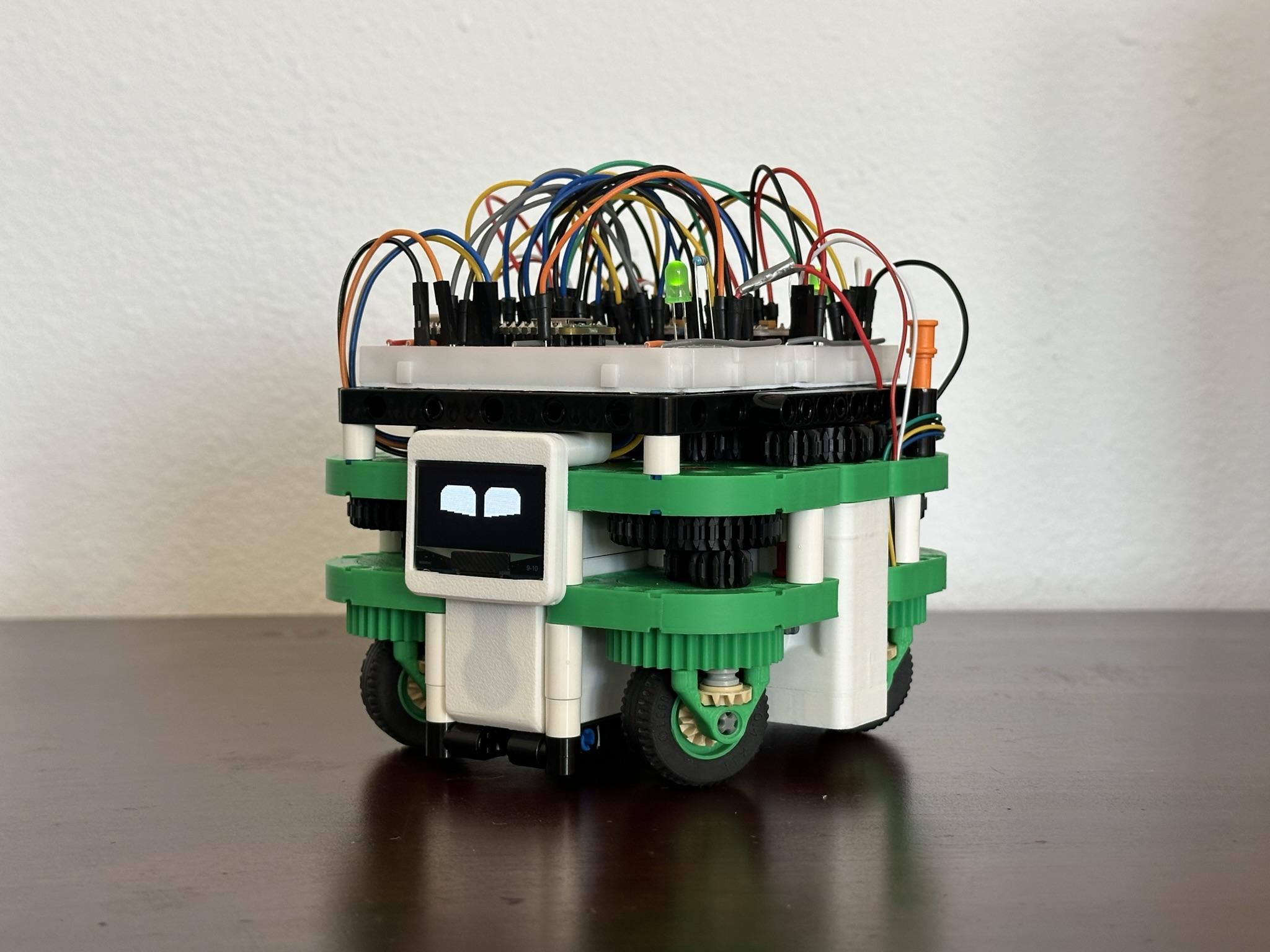
El Swervebot es un robot omnidireccional que combina LEGO y piezas impresas en 3D
Equipo Arduino – 18 de enero de 2025

Los vehículos robóticos pueden tener una amplia variedad de mecanismos de accionamiento que van desde una simple configuración de triciclo hasta patas para gatear. El proyecto de Alex Le aprovecha la confiabilidad de los bloques LEGO con la capacidad de personalizar piezas impresas en 3D para crear un robot omnidireccional altamente móvil llamado Swervebotque es controlable vía Wi-Fi gracias a un Arduino-Nano ESP32.
El mecanismo básico de un robot de accionamiento de espacio coaxial es un módulo de espacio que utiliza un eje + motor para girar la rueda y otro eje + motor para girarla. Cuando se combina con varios otros módulos de evasión en un solo chasis, el Swervebot es capaz de realizar maniobras muy complejas, como girar mientras se mueve en una dirección particular. Para cada uno de estos módulos, se montaron un par de motores de CC en carcasas personalizadas compatibles con LEGO y se conectaron a una serie de engranajes para transferir su movimiento a las ruedas. Una vez ensamblado en un diseño de 2×2, Le pasó a los siguientes pasos de cableado y programación del robot.

El Nano ESP32 está conectado a dos controladores de motor TB6612 y una pantalla para mostrar ojos animados y divertidos mientras el robot está en movimiento o inactivo. Controlar el robot gap también es fácil, ya que el ESP32 alberga una página web llena de botones y otras entradas para configurar velocidades y direcciones.
Para obtener más detalles sobre Swervebot, puede lea el artículo de Le aquí sobre Instructables.