
Este fabricante diseñó un controlador de vuelo personalizado para su dron propulsado por supercondensadores
Equipo Arduino – 12 de enero de 2025
Los drones básicos son muy asequibles hoy en día: literalmente puedes encontrarlos por menos del precio de una comida rápida en el auto. Pero eso no significa que los drones sean fáciles de controlar. En realidad, esto es bastante difícil, pero los fabricantes pueden trabajar a partir de diseños de referencia establecidos. En un vídeo que ilustra perfectamente la dificultad, The Tinkering Techie intentó fabricar un dron propulsado por un supercondensador con su propio controlador de vuelo personalizado.
La mayoría de los diseños de aviones tienen una estabilidad aerodinámica inherente. Incluso sin electricidad, pueden seguir deslizándose. Incluso los helicópteros tienen cierta estabilidad inherente en forma de autorrotación. Este no es el caso de los drones Quadrotor: necesitan energía constante y actualizaciones muy frecuentes de los controles del motor sólo para permanecer en el aire. El más mínimo error en el control resultará en una falla catastrófica. Aunque conocía el desafío, The Tinkering Techie quería intentar crear su propio controlador de vuelo.
Además del controlador de vuelo personalizado, este dron también es único por su almacenamiento de energía. En lugar de baterías de litio convencionales, cuenta con un banco de supercondensadores. Estos pueden cargarse completamente en segundos, aunque no almacenan bien la energía durante largos períodos de tiempo.
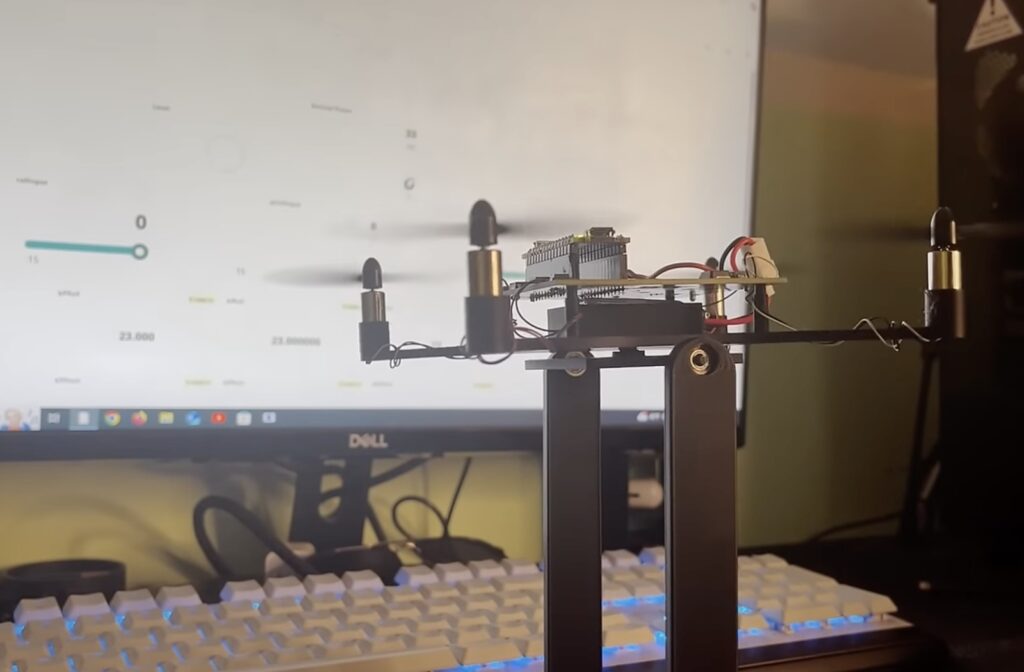
El trabajo del controlador de vuelo es dirigir la energía de los supercondensadores a los motores (motores de CC con escobillas, en este caso) con mucha precisión. A Arduino Nano 33 IoT La placa supervisa este proceso y The Tinkering Techie la eligió porque tiene sensores integrados útiles para un cuadricóptero, incluidos un giroscopio y un acelerómetro. Una PCB personalizada alberga el Arduino y los supercondensadores, mientras que un simple marco impreso en 3D une todo.
Desafortunadamente, esto no fue un éxito y The Tinker Techie finalmente no logró lograr un vuelo estable. Hay muchas razones posibles para esto, pero una de las más evidentes fue el uso de motores de CC con escobillas, que no pueden responder tan rápido como los motores de CC sin escobillas, un factor importante para un dron.