Construya su propio brazo robótico 4DOF con un presupuesto
Equipo de Arduino – 13 de junio de 2025
Los brazos del robot son muy geniales y pueden ser muy útiles, pero también tienden a ser caros. Tampoco es solo una marca, porque los componentes en sí son caros. Sin embargo, puede ahorrar mucho dinero si hace sacrificios y construye todo usted mismo. En este caso, puedes Sigue el tutorial de Ruben Sánchez Para crear su propio brazo robot de cuatro grados de libertad de cero.
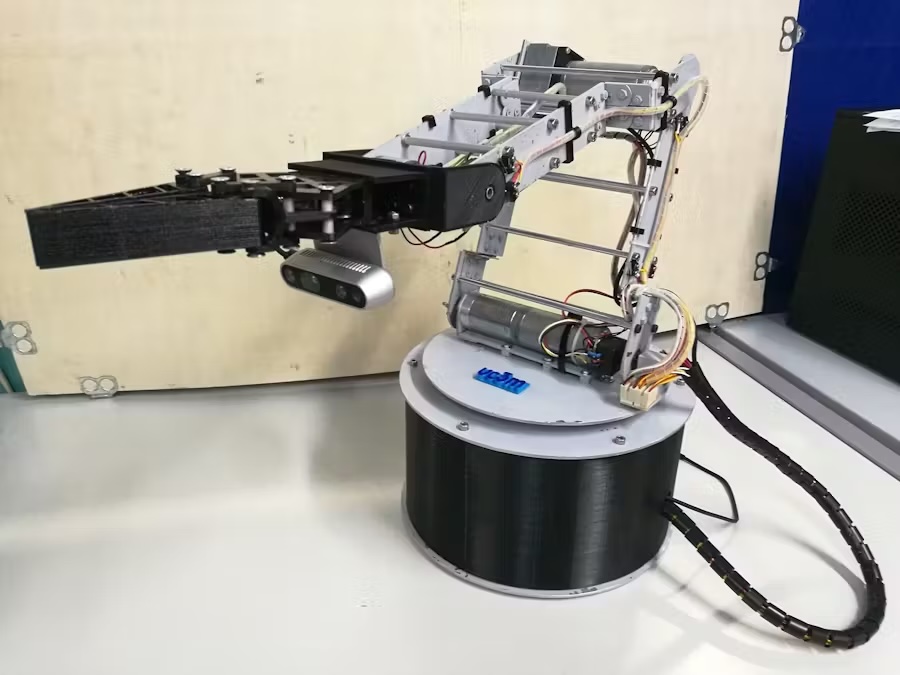
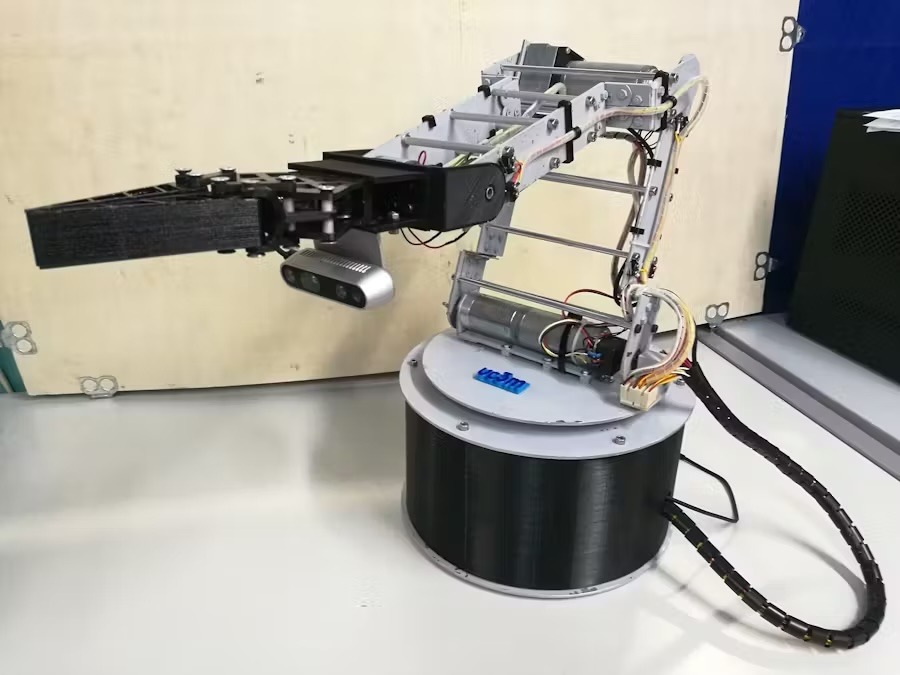
Este diseño A cuatro ejes activados: la base, el hombro, el codo y la muñeca. Según el efector final que necesita, un alicates puede contar como cualquier otro. Tiene un rango de hasta 80 cm y una capacidad de carga útil máxima de 350 g, que es suficiente para mover objetos pequeños.
Sánchez ha reducido el costo de este brazo robot (en comparación con las concepciones típicas) de dos maneras. El primero es construir el marco a partir de la hoja de aluminio de corte manual, con marcas láser como modelo de guía. El segundo es usar motores de engranajes CC con codificadores externos para la actuación, en lugar de actuadores robóticos especialmente diseñados. No tendrán tanta precisión o repetibilidad, pero son asequibles.
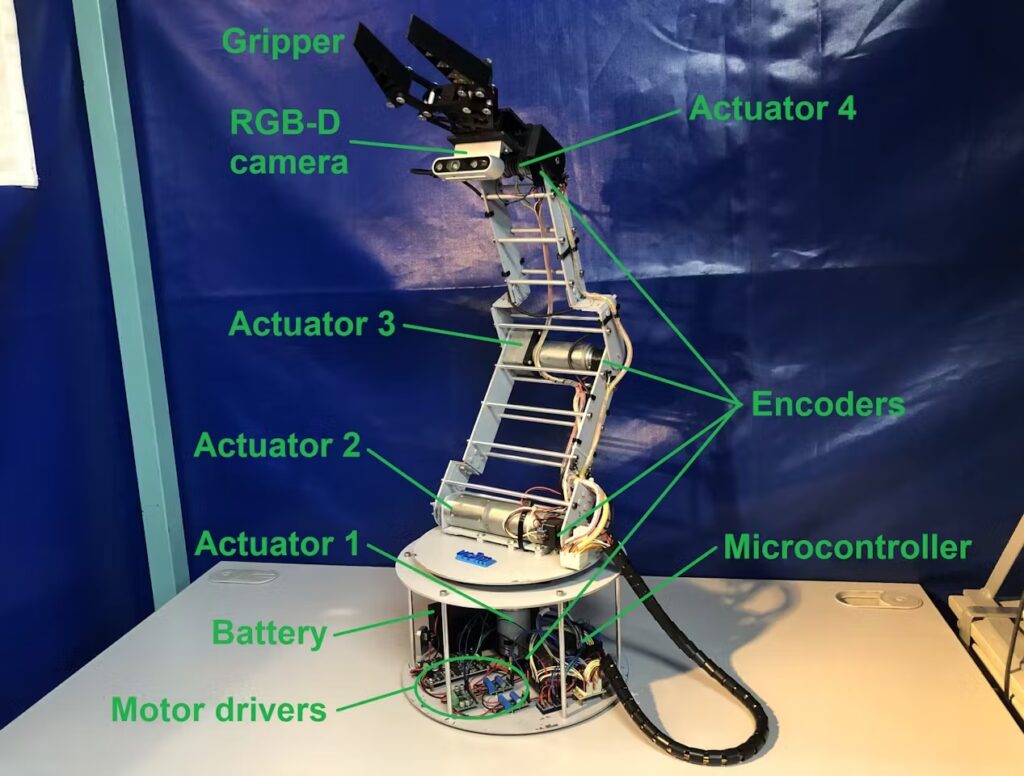
A Arduino debido La placa controla los motores a través de pilotos de Pololu. El Arduino recibe comandos de movimiento de una PC conectada, que puede consultar el área de trabajo a través de una cámara Intel RealSense adjunta por el efector final.
Sánchez proporciona el boceto Arduino para comenzar, pero alienta a los usuarios a desarrollar su propio software de control. Para ayudar a esto, su escritura incluye hermosas explicaciones sobre la escena inversa, las matemáticas involucradas y cómo implementarlo.