Uso de una visión Arduino Nicla como controlador de vuelo de drones
Equipo de Arduino – 6 de junio de 2025

Los controladores de vuelo de drones hacen mucho más que simplemente recibir señales y decirle al dron cómo moverse. Son responsables de refinar constantemente las velocidades del motor para mantener un vuelo estable, incluso con vientos cambiantes y otros factores impredecibles. Por esta razón, la mayoría de los controladores de vuelo están especialmente diseñados para el trabajo. Pero Milos Rasic d’Emlement14 construyó su propio dron a partir de cero y Descubrí que el tablero de visión Arduino Nicla es un excelente controlador de vuelo.
Para hacer este trabajo esencial para mantener el establo del dron, el controlador de vuelo debe especificar información sobre la orientación del dron y cualquier movimiento en un espacio de tres dimensiones. Afortunadamente, el Visión Nicla Tiene un sensor de movimiento integrado de seis ejes que es perfecto para el trabajo. También tiene un potente microcontrolador STM32H7, una cámara integrada para las tareas de visión y aprendizaje de la máquina, conectividad Wi-Fi y Bluetooth a bordo, y más. Y debido a que es muy pequeño (22.86 × 22.86 mm) y muy ligero, es una buena opción para un dron.
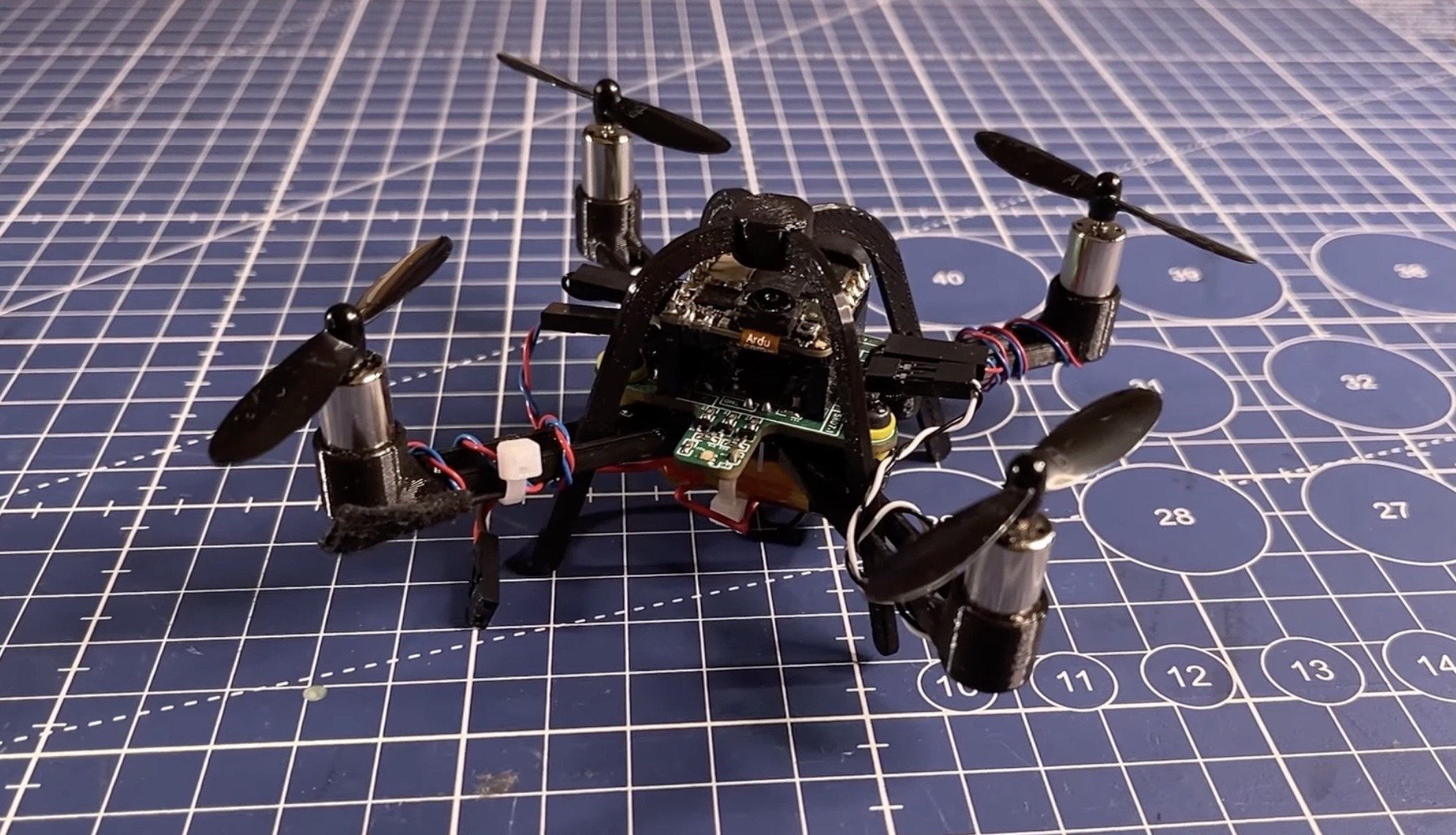
Rasic ha diseñado y hecho todo el dron desde cero, utilizando motores CC cepillados 8520 y un marco impreso en 3D. Es genial, pero no es raro. El controlador de vuelo basado en la visión de Nicla es lo que más es.
RASIC ha desarrollado una PCB personalizada para la visión NICLA que actúa como una tarjeta de ruptura y contiene algunos otros componentes útiles, como para regular y aumentar la potencia. Pero eso no necesitaba mucho, porque la visión de Nicla ya tiene la mayoría del equipo necesario.
Aunque pudo recurrir al firmware existente del controlador de vuelo, Rasic ha elegido desarrollar el suyo y esta es la parte más impresionante de este proyecto. Esto requirió la creación de tres algoritmos del controlador PID (derivado de integral proporcional) para equilibrar la altura, el rodillo y el encaje. Aquellos que operan con entradas de control para permitir que el dron se desplace y se mueva estable. Las señales de control provienen de una PC en Wi-Fi, el piloto proporciona una entrada a través de una palanca de vuelo USB.
El dron aún no vuela bien, porque la configuración del PID es un desafío para los fabricantes de drones más experimentados. Pero la base está allí para que Rasic pueda confiar.